Integration der posturalen Kontrolle in biomechanische Menschsimulationen
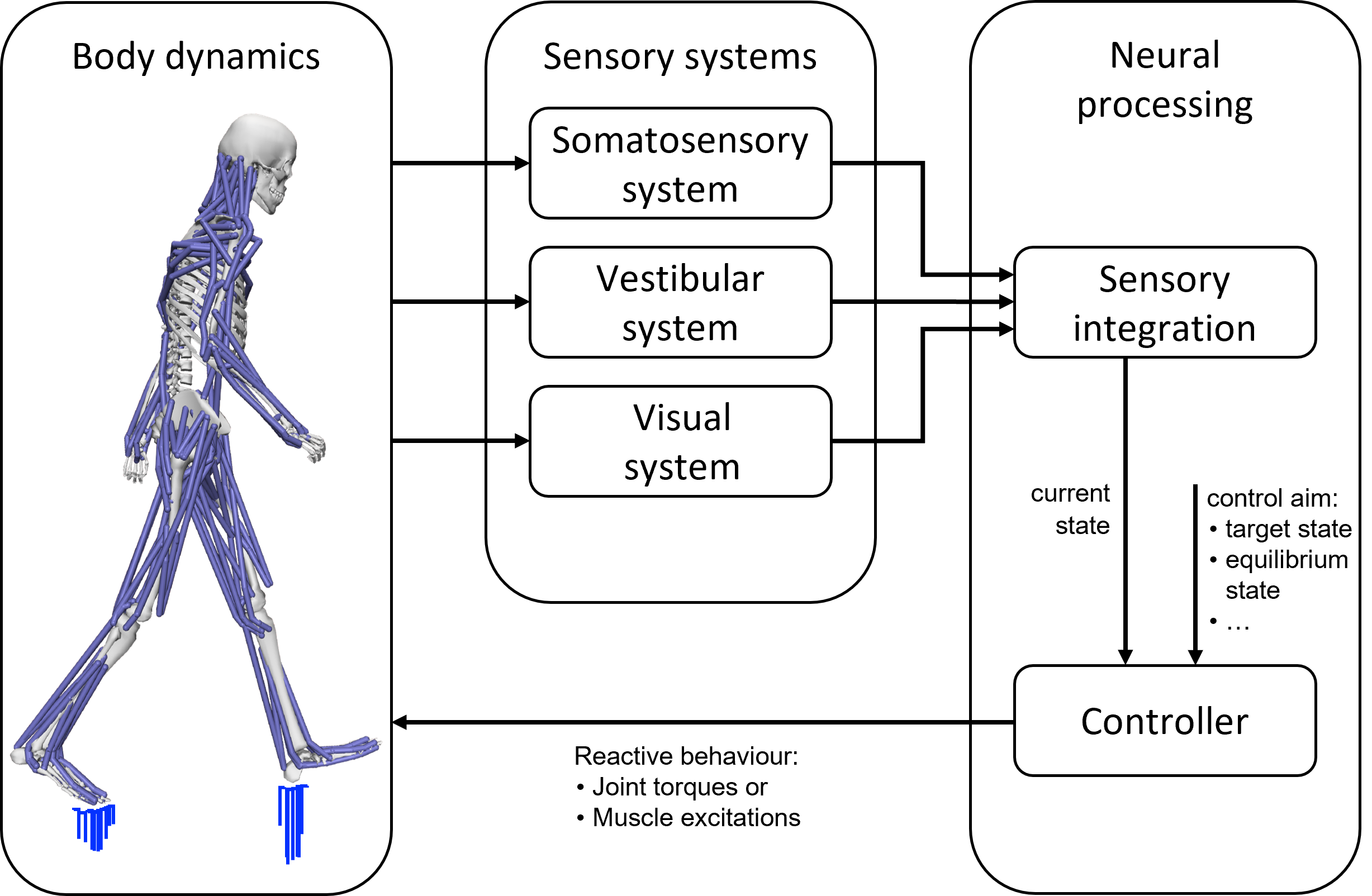
In dieser systematischen Literaturrecherche wurden verschiedene Ansätze zur Simulation der posturalen Kontrolle identifiziert. Die verschiedenen Ansätze werden im Hinblick auf die verwendeten biomechanischen Modelle, die berücksichtigten sensorischen Informationen, deren Integration und die Kontrollmethoden in Stand- und Gangsimulationen diskutiert. Für die posturale Kontrolle werden Optimalsteuerungsmethoden wie lineare quadratische Regler und modellprädiktive Kontrollmethoden (model predictive control) seltener verwendet, wenn der Detailgrad der Modelle zunimmt und Nichtlinearitäten an Bedeutung gewinnen. Bei muskuloskelettalen Modellen werden hauptsächlich reflexbasierte und PD-Regler eingesetzt und zeigen vielversprechende Ergebnisse, da sie darauf abzielen, menschenähnliches Bewegungsverhalten unter Berücksichtigung physiologischer Prozesse zu erzeugen.
Der Artikel ist im Journal of NeuroEngineering and Rehabilitation erschienen und ist open-access verfügbar: https://doi.org/10.1186/s12984-023-01235-3