
Abschlussbericht der KTmfk-Teilprojekte in der ersten Förderperiode des SFB 1483 EmpkinS
Um Bewegungen des menschlichen Körpers präzise, störungsarm und nicht-invasiv zu erfassen, werden im DFG-geförderten Sonderforschungsbereichs (SFB) 1483 EmpkinS (Empathokinästhetische Sensorik) neue Sensortechnologien und datenbasierte Verfahren erforscht. Der Lehrstuhl für Konstruktionstechnik (KTmfk) ist mit zwei Teilprojekten beteiligt, die digitale Menschmodelle einsetzen, um Bewegungsdaten modellbasiert zu analysieren und daraus Informationen über körperinterne Zustände abzuleiten. Ziel war es, in der ersten Förderperiode die Basis für eine verbesserte, personenspezifische Simulation menschlicher Bewegung zu schaffen.
Im ersten Teilprojekt (C02) wurden Methoden zur Filterung und Analyse multimodaler Bewegungsdaten erforscht, die Positions-, Orientierungs-, Oberflächen- und Elektromyographiedaten kombinieren. Mithilfe individualisierter muskuloskelettaler Modelle sollte die Genauigkeit und physikalische Konsistenz der Simulationsergebnisse deutlich gesteigert werden. Hierfür wurden Verfahren zur Anpassung von Modellen an individuelle Anthropometrien entwickelt und in Pilotstudien validiert. Ergänzend wurde ein Ansatz zur Bestimmung personenspezifischer Gelenkachsen untersucht und erfolgreich umgesetzt. Eine Sensitivitätsanalyse zeigte, dass die kombinierte Auswertung unterschiedlicher Datentypen (multimodaler Ansatz) zu signifikant verlässlicheren Simulationsergebnissen führt als herkömmliche Verfahren.
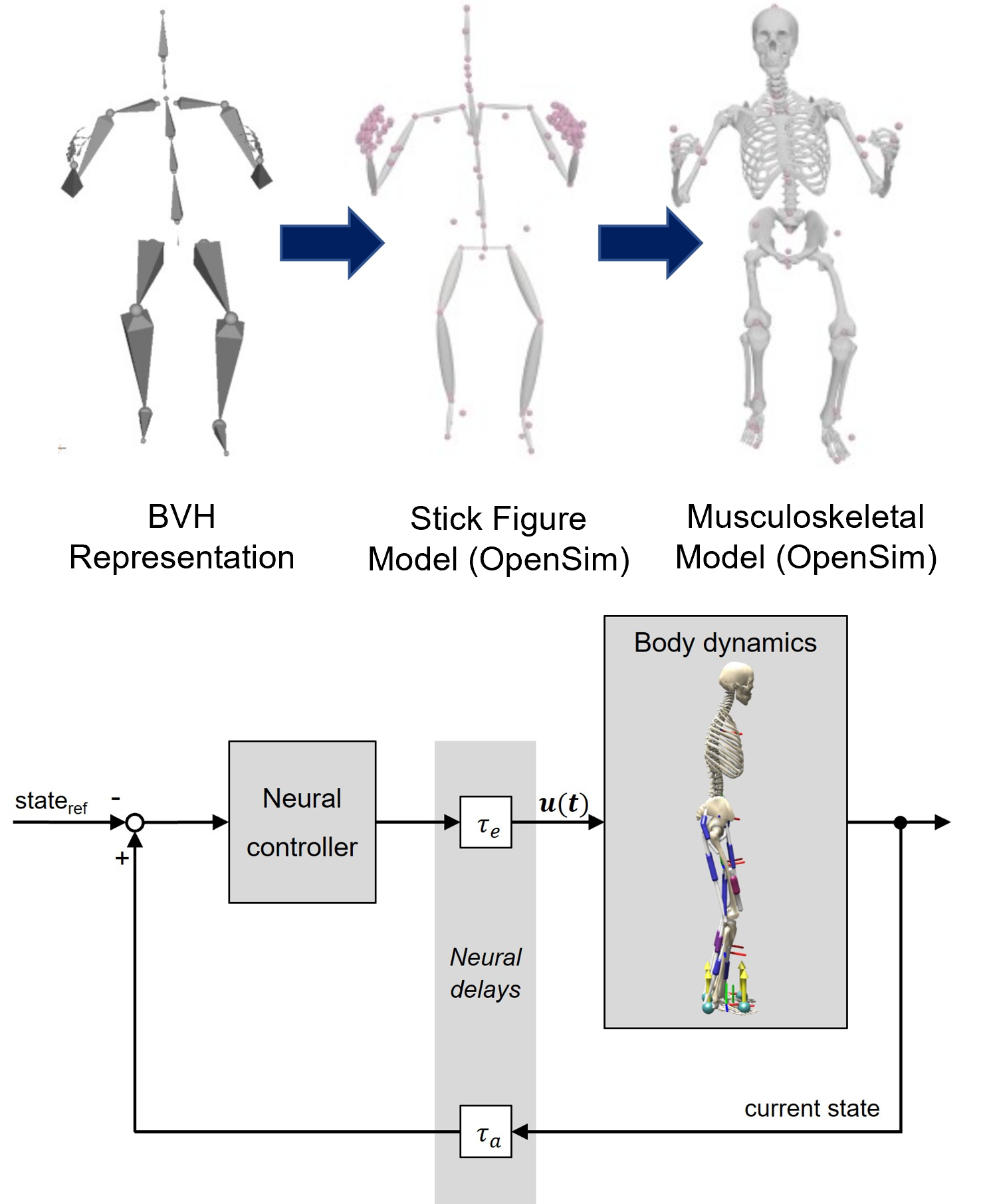
Das zweite Teilprojekt (C03) widmete sich der Integration der posturalen Kontrolle in digitale Menschmodelle. Untersucht wurde, wie sich die sensomotorische Steuerung – das Zusammenspiel visueller, vestibulärer und somatosensorischer Rückmeldungen – modellbasiert abbilden lässt und in welchen Aspekten sie sich bei Patientinnen und Patienten mit Morbus Parkinson von gesunden Personen unterscheidet. Eine Einschränkung der posturalen Kontrolle zählt zu den Hauptsymptomen neurodegenerativer Erkrankungen. Im Projekt wurde ein erweitertes Modell entwickelt, das virtuelle Rezeptoren integriert und sensomotorische Rückkopplungen simulativ abbildet. Studien mit Parkinson-Patienten und gesunden Probanden identifizierten charakteristische Bewegungsparameter und Unterschiede in den Kontrollmechanismen, die zur Stabilisierung und Wiedererlangung des Gleichgewichts beitragen. Beide Teilprojekte konnten in der ersten Förderperiode wesentliche methodische und wissenschaftliche Grundlagen für präzise, multimodale Bewegungsanalysen sowie erweiterte prädiktive Simulationen schaffen. Die Kombination aus EmpkinS-Sensorik, digitaler Menschmodellierung und sensomotorischer Simulation bildet eine Basis für weiterführende Arbeiten in der zweiten Förderphase. Langfristig eröffnen die Ergebnisse neue Perspektiven für Anwendungen in der Biomechanik, der Medizintechnik und der Mensch-Maschine-Interaktion, insbesondere im Hinblick auf personalisierte Bewegungsanalysen und Therapieansätze.